本页目录
复现:NeRF-RPN
说明
复现仓库:https://github.com/lyclyc52/NeRF_RPN
这项研究在NeRF中引入RPN,用于3D物体检测和相关任务。作者提供了改写的Instant-NGP以供可视化3D提议框。我自己在尝试复现的时候绕了一些弯子,因此借这篇博客复盘一下当时的过程。仓库提供的脚本多为适用于Linux系统的.sh文件,而我自己的设备是Windows系统,因此示例中会给出适用于Windows系统的相应指令。
环境相关
克隆仓库
git clone https://github.com/lyclyc52/NeRF_RPN.git NeRFrpn环境配置参照官方仓库说明文档即可。
配置Instant-NGP Fork for NeRF Feature Extraction
作者修改了Instant-NGP的仓库,添加了一些包括可视化bbox在内的功能。说明文档在这里。
git clone --recursive https://github.com/zymk9/instant-ngp.git InstantNGPforked这是Instant-NGP一个早期版本,执行下面的命令运行build过程。更多细节可以参考这里。
cd InstantNGPforked
cmake . -B build
cmake --build build --config RelWithDebInfo -j
问题解决
git clone 失败,报错 fatal: early EOF
报错:
error: xxxx bytes of body are still expected
fetch-pack: unexpected disconnect while reading sideband packet
fatal: early EOF
fatal: fetch-pack: invalid index-pack output
解决:增大缓冲区(1048576000是1G)
git config --global http.postBuffer 1048576000子模块没有一次性下载成功
解决:进入目录手动重新下载
cd InstantNGPforked
git submodule update --init --recursive
下载数据集
作者提供了数据集的OneDrive链接,这里以3D-FRONT数据集作为例子,需要从作者提供的链接中下载front3d_nerf_data.zip和front3d_rpn_data.zip。
假设数据集解压的路径为E:\front3d_nerf_data和E:\front3d_rpn_data。
可视化数据集
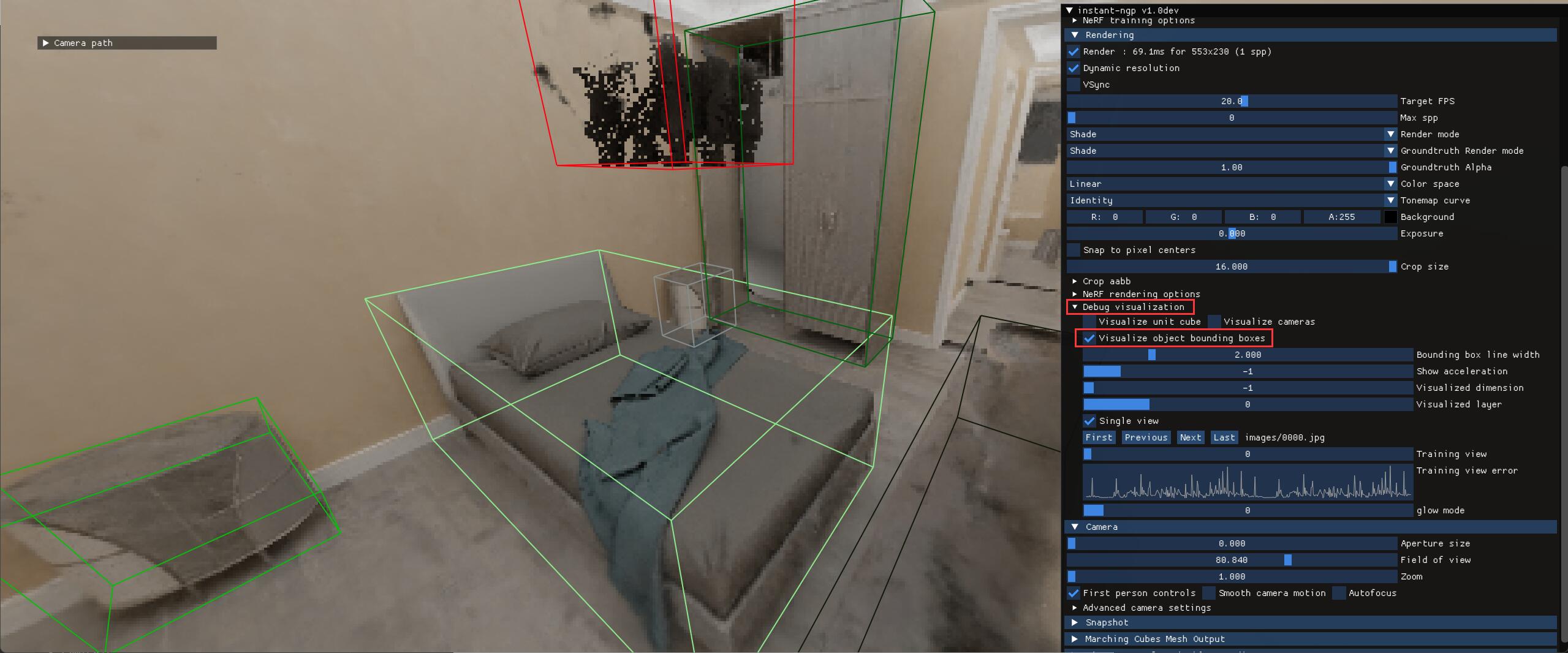
在完成上面步骤后,就可以先利用Instant-NGP的UI可视化数据集中标注的Ground Truth了,这里以场景3dfront_0004_00为例:
cd InstantNGPforked
.\build\testbed --scene E:\front3d_nerf_data\3dfront_0004_00\train
执行上述命令后,勾选UIDebug visualization下的Visualize object bounding boxes就可以看到如下结果:
下载预训练的权重
本博客给出的示例需要在上面的OneDrive链接中下载nerf_rpn_model_release\front3d_anchor_resnet50.pt。
假设预训练权重保存的路径为NeRFrpn\nerf_rpn\weights\front3d_anchor_resnet50.pt。
生成proposals
接下来,利用预训练的权重,写一个test脚本生成提议框。
# NeRFrpn\nerf_rpn\test.bat
set DATA_ROOT=E:\front3d_rpn_data
cd NeRFrpn\nerf_rpn
python -u run_rpn.py ^
--mode "eval" ^
--dataset_name front3d ^
--resolution 160 ^
--backbone_type resnet ^
--features_path %DATA_ROOT%\features ^
--boxes_path %DATA_ROOT%\obb ^
--dataset_split %DATA_ROOT%\3dfront_split.npz ^
--save_path .\results\front3d_test ^
--checkpoint .\weights\front3d_anchor_resnet50.pt ^
--rpn_nms_thresh 0.3 ^
--normalize_density ^
--rotated_bbox ^
--batch_size 1 ^
--gpus 0 ^
--output_proposals
由于我的设备显存小,所以把batch_size改为了1。原始的参数是2。
运行后会在NeRFrpn\nerf_rpn\results\front3d_test中得到eval.json文件和储存了17个测试场景的提议框的proposals目录。
问题解决
CUDA device 不匹配
报错:
RuntimeError: Attempting to deserialize object on CUDA device 4 but torch.cuda.device_count() is 1.
Please use torch.load with map_location to map your storages to an existing device.
解决:在run_rpn.py找到下面这行代码:
checkpoint = torch.load(args.checkpoint)我的设备上只有一个GPU,因此修改为:
checkpoint = torch.load(args.checkpoint, map_location={'cuda:4':'cuda:0'})运行proposals2ngp.py
下一步是生成Instant-NGP所需的transform.json。
# NeRFrpn\nerf_rpn\proposals2ngp.bat
set DATA_DIR=E:\
cd NeRFrpn\nerf_rpn
python scripts\proposals2ngp.py ^
--bbox_format obb ^
--dataset front3d ^
--dataset_path %DATA_DIR%\front3d_nerf_data ^
--features_path %DATA_DIR%\front3d_rpn_data\features ^
--proposals_path .\results\front3d_test\proposals ^
--output_dir .\results\proposals_to_ngp
运行后会在NeRFrpn\nerf_rpn\results\proposals_to_ngp中得到17个测试场景的3dfront_xxxx_xx.json文件。
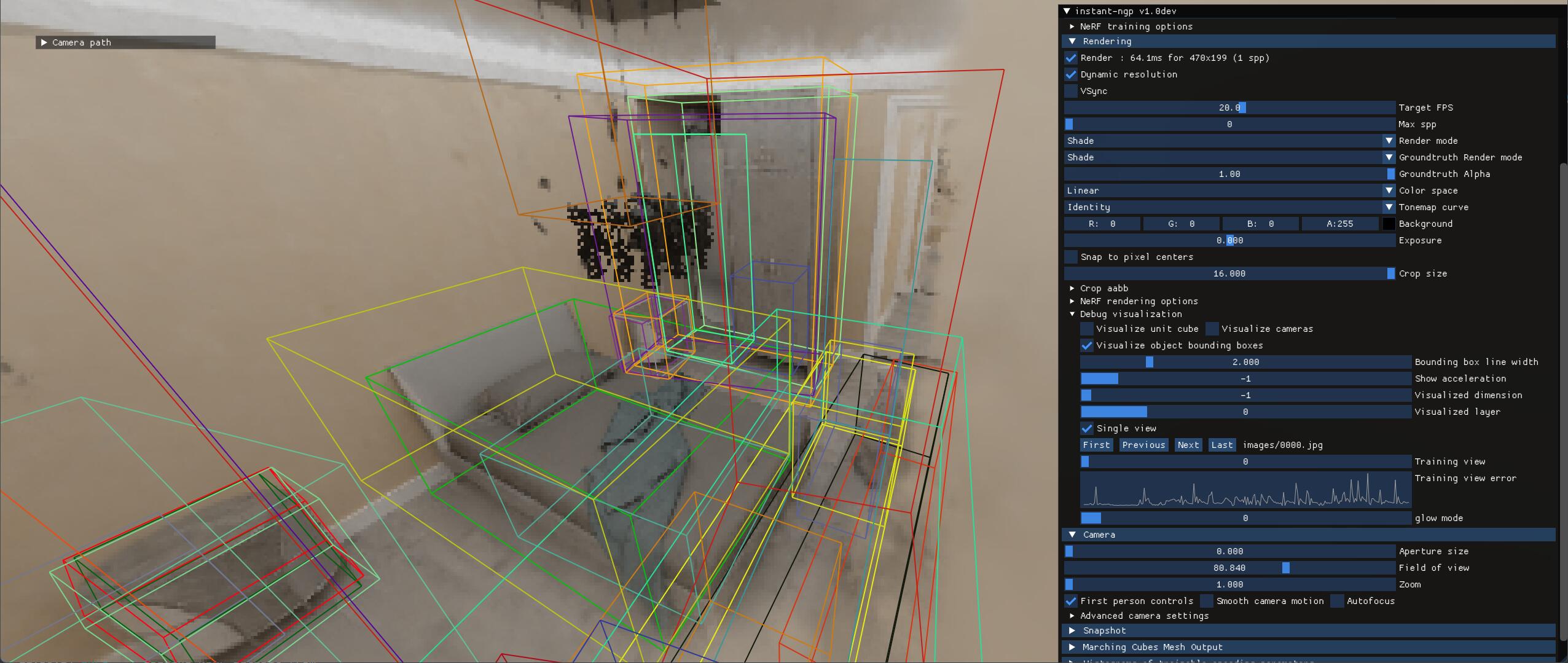
接下来,把文件3dfront_0004_00.json复制到路径E:\front3d_nerf_data\3dfront_0004_00\train下,然后启动Instant-NGP的UI并指定这个新的json文件:
cd InstantNGPforked
.\build\testbed --scene E:\front3d_nerf_data\3dfront_0004_00\train\3dfront_0004_00.json
可以看到如下结果:
文件结构参考
这里展示了前面我们生成、或需要用到的各个文件的路径示意。注意这并不是仓库中的全部内容,而是只展示了前面提及的文件。
<work_dir>
├── InstantNGPforked
└── NeRFrpn
└── nerf_rpn
├── results
├── front3d_test
└── proposals
3dfront_0004_00.npz
3dfront_0019_00.npz
...
3dfront_1006_02.npz
3dfront_1014_02.npz
eval.json
└── proposals_to_ngp
3dfront_0004_00.json
3dfront_0019_00.json
...
3dfront_1006_02.json
3dfront_1014_02.json
├── scripts
proposals2ngp.py
└── weights
front3d_anchor_resnet50.pt
proposals2ngp.bat
test.bat
E:\
├── front3d_nerf_data
├── 3dfront_0000_00
├── 3dfront_0000_01
├── ...
├── 3dfront_0004_01
├── overview
└── train
└── images
model.msgpack
transforms.json
3dfront_0004_00.json (copied from NeRFrpn\nerf_rpn\results\proposals_to_ngp)
├── ...
├── 3dfront_1015_02
└── 3dfront_1015_04
└── front3d_rpn_data